Metody pomiarów z użyciem bezzałogowych statków powietrznych: fotogrametria i mobilny skaning laserowy
Badania z użyciem BSL/UAV miały na celu:
- Porównanie produktów pochodnych – fotogrametrycznych i skaningu laserowego
- Weryfikacja produktów fotogrametrycznych na podstawie pomiaru bezpośredniego
- Wzajemne porównanie wyników uzyskanych różnymi kamerami niemetrycznymi
- Wzajemne porównanie wyników uzyskanych różnym oprogramowaniem na podstawie tych samych danych
- Optymalizacja parametrów lotu oraz opracowania pod kątem efektywności i dokładności
- Zweryfikowanie czy chmury punktów z referencją w jednolitym układzie współrzędnych, uzyskanie za pomocą technik fotogrametrycznych, mogą służyć do detekcji osiadań terenu wywołanych podziemną eksploatacją górniczą.
- Wykonanie kompleksowej weryfikacji możliwości uzyskiwania NMT z użyciem BSP/UAV w oparciu o eksperymenty na czterech polach testowych, charakteryzujących się zróżnicowaną morfologią oraz zagospodarowaniem, w szczególności poprzez weryfikację możliwości filtracji chmur punktów z mobilnego skaningu laserowego.
W badania z tego zakresu zaangażowane były zespół z Wydziału Geodezji Górniczej i Inżynierii Środowiska (Katedry Geodezji Inżynieryjnej i Budownictwa) w składzie: dr hab. inż. Tomasz Owerko, dr inż. Przemysław Kuras, dr inż. Łukasz Ortyl, dr inż. Rafał Kocierz
Badania wykonano na obszarze 10 poligonów testowych.
Zastosowano 4 jednostki BSP o różnych rozwiązaniach konstrukcyjno – sprzętowych
Pomiarem objęto obszar 257 ha
Dane opracowano w rożnych wariantach doboru parametrów przetwarzania materiału pomiarowego
1. Poligon badawczy 13 Cz (Czernichów)
Na poligonie zlokalizowanym w Czernichowie (woj. małopolskie, powiat krakowski) zakres wykonywanych badań obejmował uzyskanie, na potrzeby porównania z innymi technologiami pomiarowymi, chmur punktów w jednolitym układzie współrzędnych za pomocą technik fotogrametrycznych oraz techniką skanowania laserowego. Niezależnie wykonano również prace klasycznymi technikami geodezyjnymi. Pracę zaplanowano i wykonano w terminie odpowiadającym minimalnej wegetacji, tak aby produkty fotogrametryczne w możliwe jak najwierniejszy sposób oddawały przebieg terenu, a w konsekwencji aby zachodziła możliwość porównania otrzymanych wyników z klasycznymi metodami pomiarowymi. Drugim z celów badawczych było wzajemne porównanie wyników uzyskiwanych różnymi kamerami niemetrycznymi zainstalowanymi na trzech różnych bezzałogowych statkach powietrznych oraz porównanie wyników opracowania z wykorzystaniem różnych typów oprogramowania przy opracowywaniu tego samego zestawu fotogrametrycznych danych pomiarowych.
Do pomiarów wykorzystano trzy bezzałogowe statki powietrzne. Wirnikowiec (quadcopter konstrukcji W. Pęczka) ze zmodyfikowaną kamerą GoPro, płatowiec marki Fenix z aparatem Sony alfa 6000 z obiektywem Voigtlander 40 mm oraz płatowiec Trimble UX HP z kamerą Sony a7R z obiektywem Voigtlander 35 mm. Pomiary współrzędnych fotogrametrycznej osnowy naziemnej wykonano w oparciu o system RTK/RTN GPS oraz niezależnie pomiarem tachimetrycznym. Wstępną ocenę dokładności uzyskano przez analizę punktów kontrolnych i weryfikujących. Wykonano analizy w trzech kryteriach: porównanie danych pozyskanych z bezzałogowych statków powietrznych między sobą, porównanie wyników uzyskanych oprogramowaniem różnych producentów oraz porównanie danych fotogrametrycznych z danymi z pomiaru bezpośredniego.
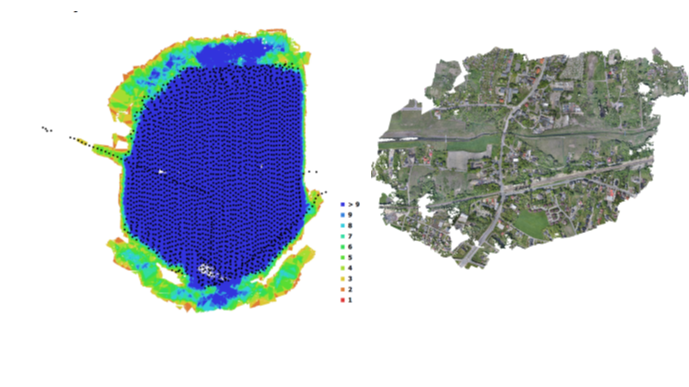
Przykład prac obejmującym pierwsze kryterium jest przedstawiony histogramem różnic pomiędzy chmurami punktów uzyskanymi dwoma płatowcami - Trimble oraz Fenix
Drugi przykład obejmuje histogram różnic pomiędzy chmurami punktów uzyskanymi na podstawie tych samych danych przy użyciu dwóch niezależnych typów oprogramowania Bentley ContexCapture i AgisoftPhotoScan
Trzeci przykład obejmuje porównanie danych pozyskanych metodą fotogrametryczną oraz pomiarem bezpośrednim. Danymi referencyjnymi jest klasyczny pomiar bezpośredni.
2. Poligon badawczy 12-G (GZW)
Celem prac badawczych na Górnym Śląsku było uzyskanie modelu terenu poprzez zastosowanie bezzałogowych statków powietrznych wyposażonych w niemetryczne kamery fotogrametryczne, a następnie zweryfikowanie, między innymi poprzez porównanie z klasycznymi technologiami pomiarowymi oraz satelitarną interferometrią radarową, czy chmury punktów z referencją w jednolitym układzie współrzędnych, uzyskane za pomocą technik fotogrametrycznych, mogą służyć do detekcji osiadań terenu wywołanych podziemną eksploatacją górniczą.
Pomiary testowe wykonano dwuetapowo: w marcu (21.03) oraz maju (18.05) 2017 roku. Badania obejmowały obszar poligonu testowego 12-G zlokalizowanego na terenie Rudy Śląskiej w miejscach przewidywanej eksploatacji górniczej. Poligon został podzielony na dwie części: część (nieckę) zachodnią oraz część (nieckę) wschodnią o przybliżonych współrzędnych środków tych obszarów: 50°16'00"N, 18°51'43"E oraz 50°16'11"N, 18°49'31"E (WGS 84).
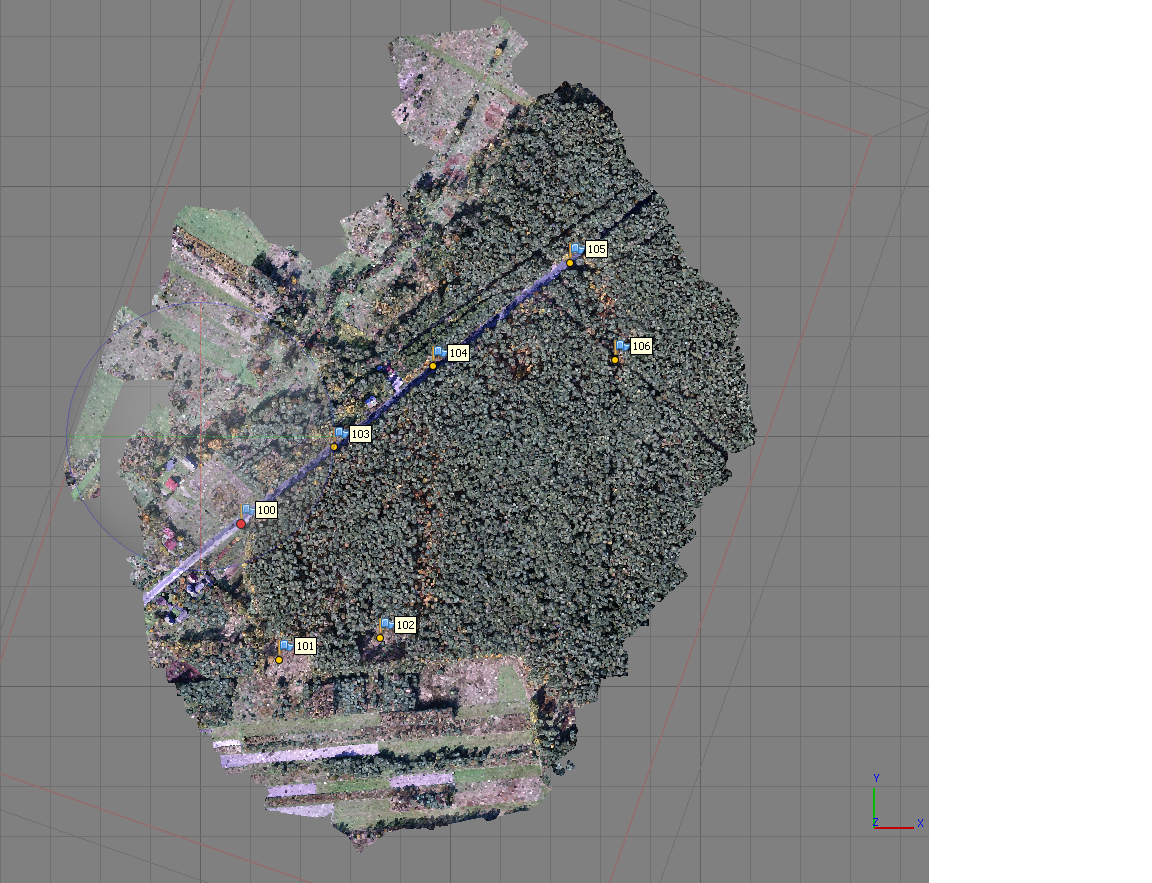
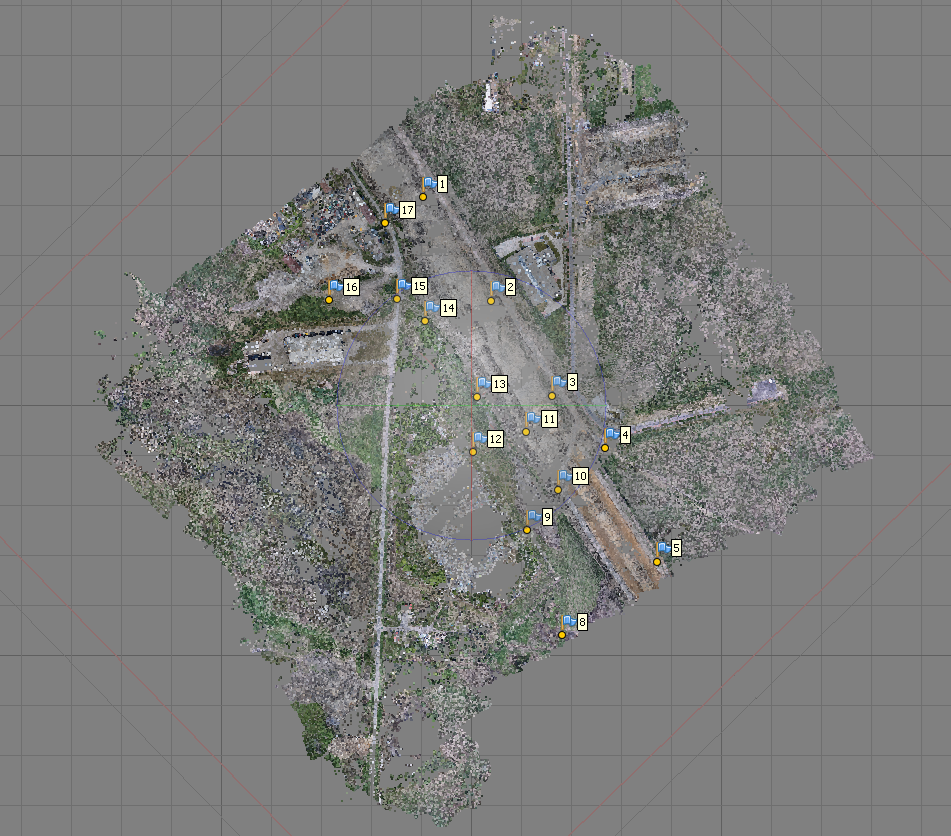
Pomiary fotogrametryczne zostały wykonane z wykorzystaniem płatowca marki Flytech Fenix, przy czym projektowane pokrycie poprzeczne i podłużne miało osiągnąć wartość nie gorszą niż 80%. Położenie środków rzutów zdjęć oraz informacja o pokryciu poligonu 12-G za pomocą zdjęć dla części wschodniej poligonu w pomiarze marcowym są zobrazowane na poniższym obrazie.
Efektem pomiarów są gęste chmury punktów, których referencja została nadana poprzez pomiar punktów GCP na zdjęciach. W ten sposób uzyskano dane do orientacji wewnętrznej, zewnętrznej oraz parametry kamery, w tym dystorsji obiektywu.
Po wykonaniu na tym obszarze niwelacji geometrycznej możliwe było zweryfikowanie możliwości zastosowania technik fotogrametrycznych do pomiaru osiadań powierzchni terenu wywołanych eksploatacją górniczą.
3. Poligon badawczy 3-S19 (Kraśnik)
Najbardziej obszerny i kompleksowy program badań został zrealizowany na poligonie testowym 3-S19 (Kraśnik). Prace zostały wykonane na czterech polach testowych, a każde z nich obejmowało obszar około 500x300 metrów i charakteryzowało się różną morfologią oraz zagospodarowaniem. Najbardziej obszerny był też zestaw badań. Prace wykonano w oparciu o zweryfikowaną już wcześniej metodę fotogrametryczną (zarówno z pełnego pułapu lotniczego, jak również z niższego pułapu przy użyciu bezzałogowych statków powietrznych), z wykorzystaniem skanowania laserowego (lotniczego, z wykorzystaniem BSP oraz naziemnego) oraz przy użyciu klasycznych technik pomiarowych.
Pomiary fotogrametryczne wykonano opisywanymi już kopterem oraz płatowcem, natomiast pomiar lidarowy z pułapu BSP wykonano wirnikowcem RIEGL RiCopter wyposażonym w skaner laserowy Riegl VUX-1UAV. Zastosowanie skanera Riegl umożliwiło filtrowanie chmur punktów z zastosowaniem mechanizmu analizy wielokrotnego echa cyfrowego sygnału pomiarowego (tak zwany full waveform analysis), a w konsekwencji efektywne odfiltrowanie wysokiej zieleni leśnej i zredukowanie chmury punktów do wiarygodnej reprezentacji NMT.

Opracowanie fotogrametrycznych danych pomiarowych obejmowało uzyskanie chmur punktów, NMPT oraz ortofotomap. Wstępną kontrolę dokładności wykonano w oparciu o grupy punktów kontrolnych i weryfikujących. Średni całkowity błąd położenia na tych punktach wahał się od 7 do 9 centymetrów.
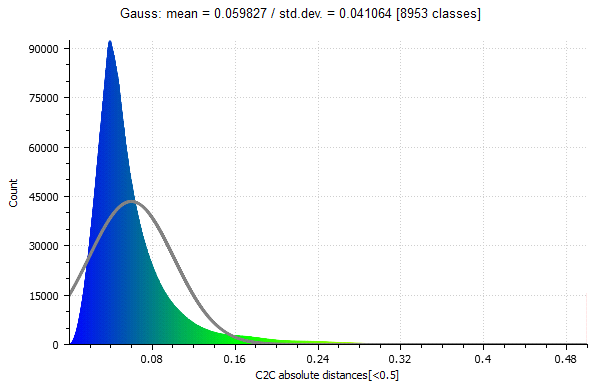
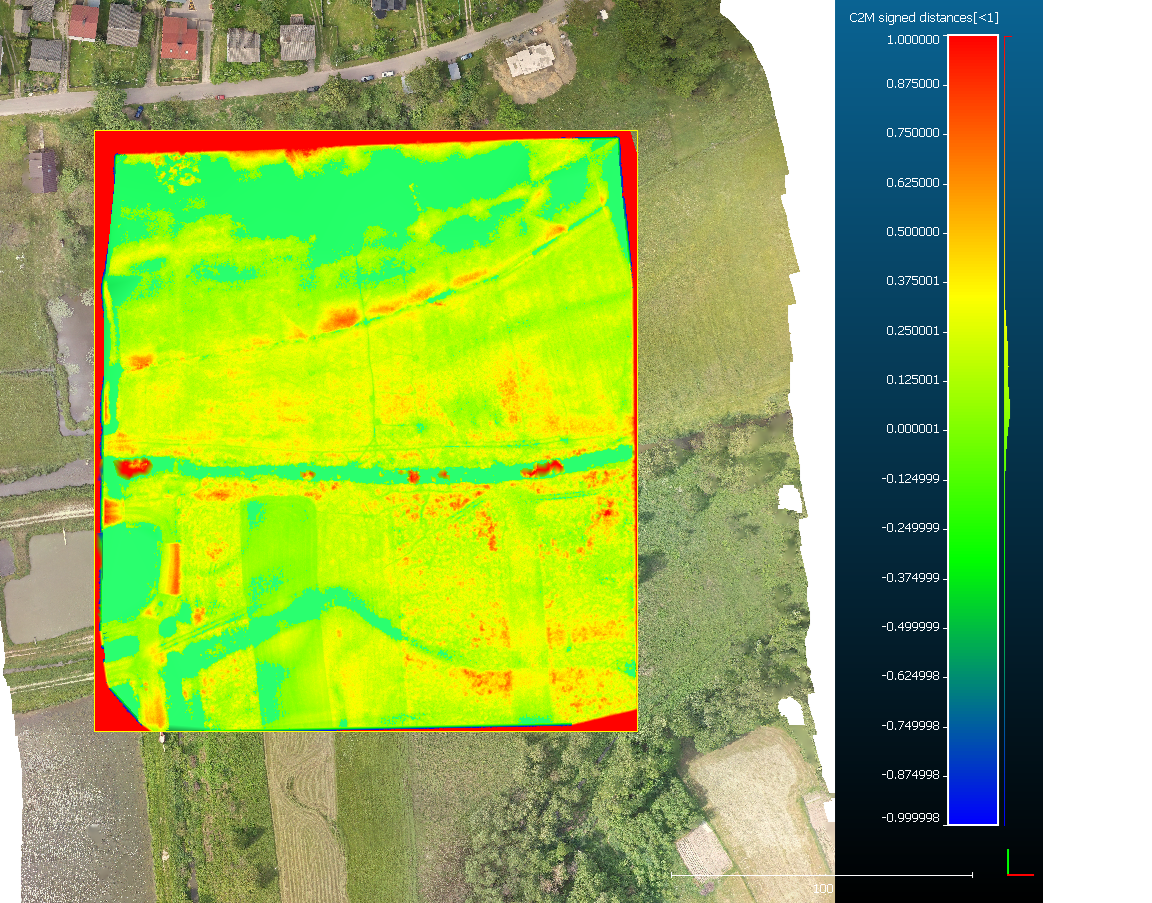
Poniżej przedstawiono przykładowe porównanie chmur punktów uzyskanych na podstawie pomiaru lidarowego z pułapu BSP/UAV oraz pomiaru klasycznego dla pola testowego numer 2. Referencją w porównaniu były dane z pomiaru klasycznego (RTN GNSS/TC), dlatego wynik odzwierciedla różnice lub błędy samego pomiaru oraz niedoskonałości wynikające z generalizacji przy pomiarze techniką o niższej rozdzielczości terenowej (techniki klasycznej).
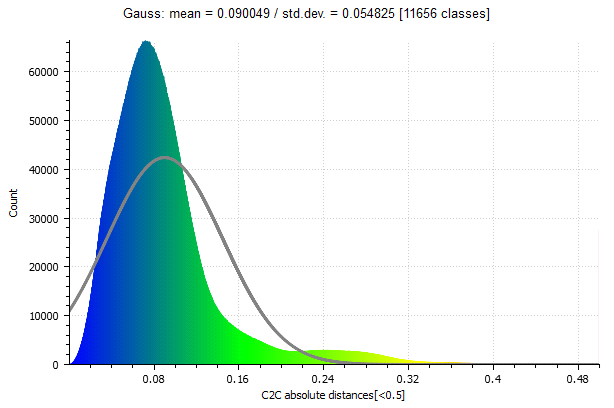
Dla tego samego obszaru wykonano porównanie techniki fotogrametrycznej z pułapu BSP/UAV z techniką lidarową z pułapu BSP/UAV.
Najciekawsze wyniki uzyskano dla pola testowego numer 4. Obszar opracowania jest w pełni zalesiony, dlatego klasyczne podejście fotogrametryczne nie może być efektywnie zastosowane dla pozyskania informacji o NMT.
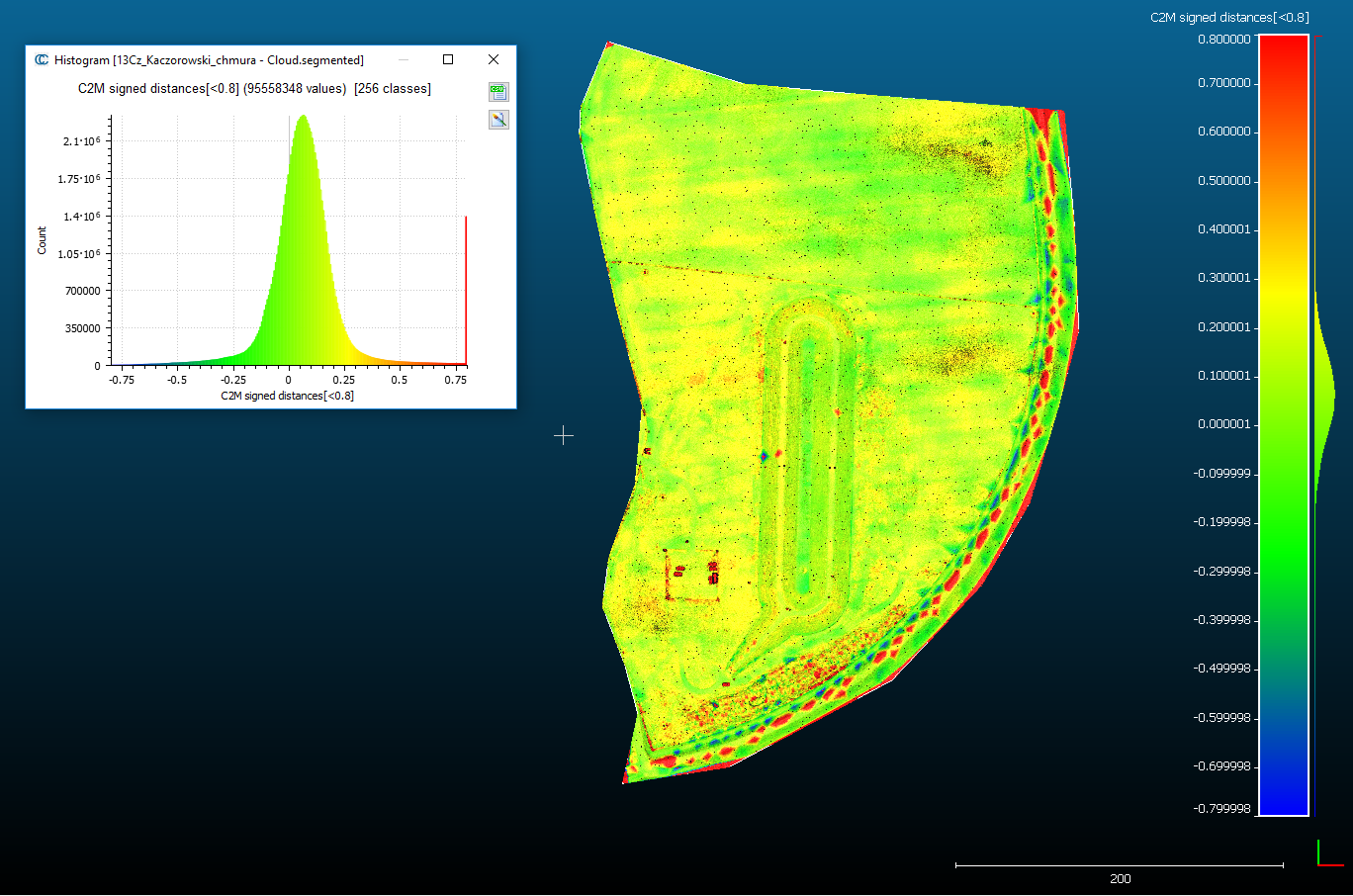
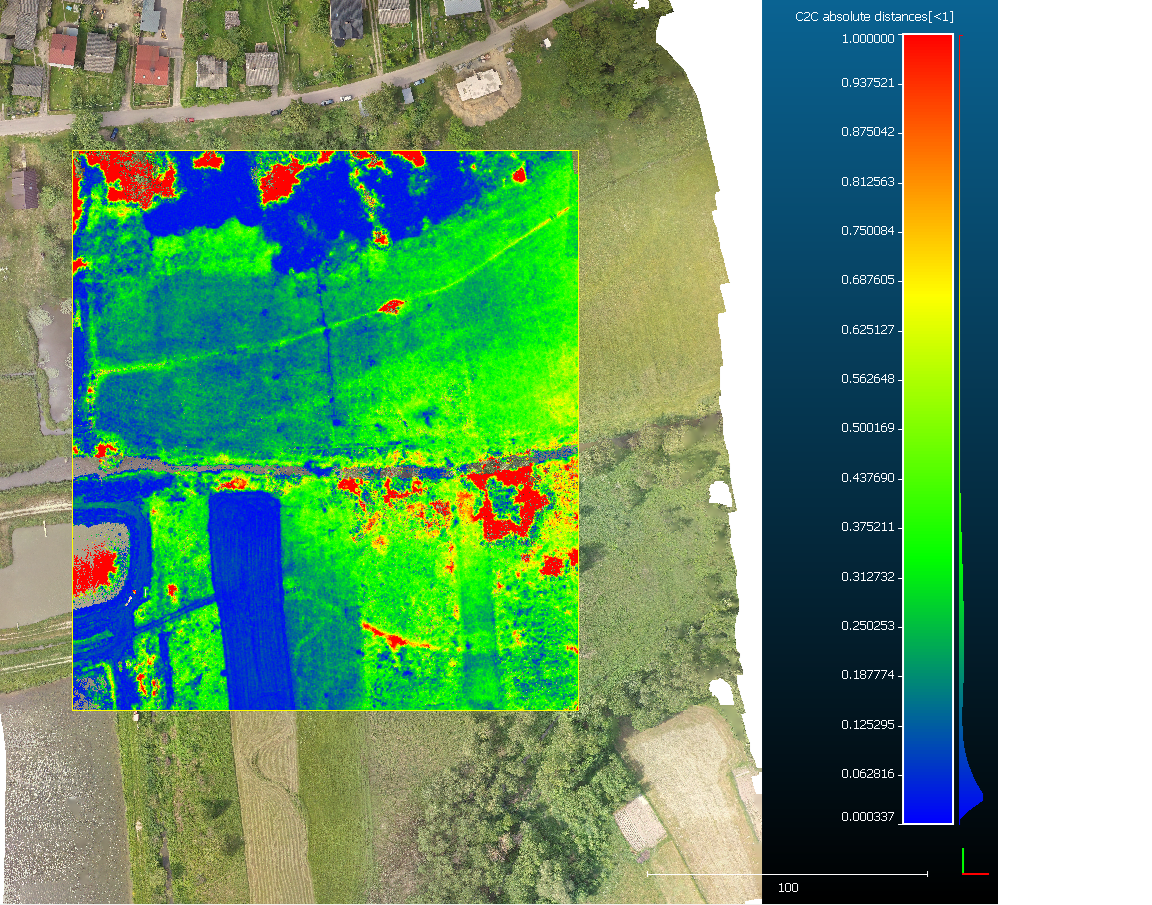
Dla oceny możliwości pozyskiwania danych o NMT mających charakter pomiarów wysokiej rozdzielczości w terenach zalesionych wykonano porównanie chmur punktów uzyskanych na podstawie pomiaru lidarowego z pułapu BSP/UAV oraz pomiaru klasycznego dla pola testowego numer 4. Referencją w porównaniu była chmura z pomiaru klasycznego (RTN GNSS/TC), dlatego wynik odzwierciedla różnice lub błędy samego pomiaru oraz niedoskonałości wynikające z generalizacji przy pomiarze techniką o niższej rozdzielczości terenowej (techniki klasycznej). Zwraca uwagę fakt, że pomimo terenu zalesionego technika lidarowa umożliwia dokładne odwzorowanie form terenowych.
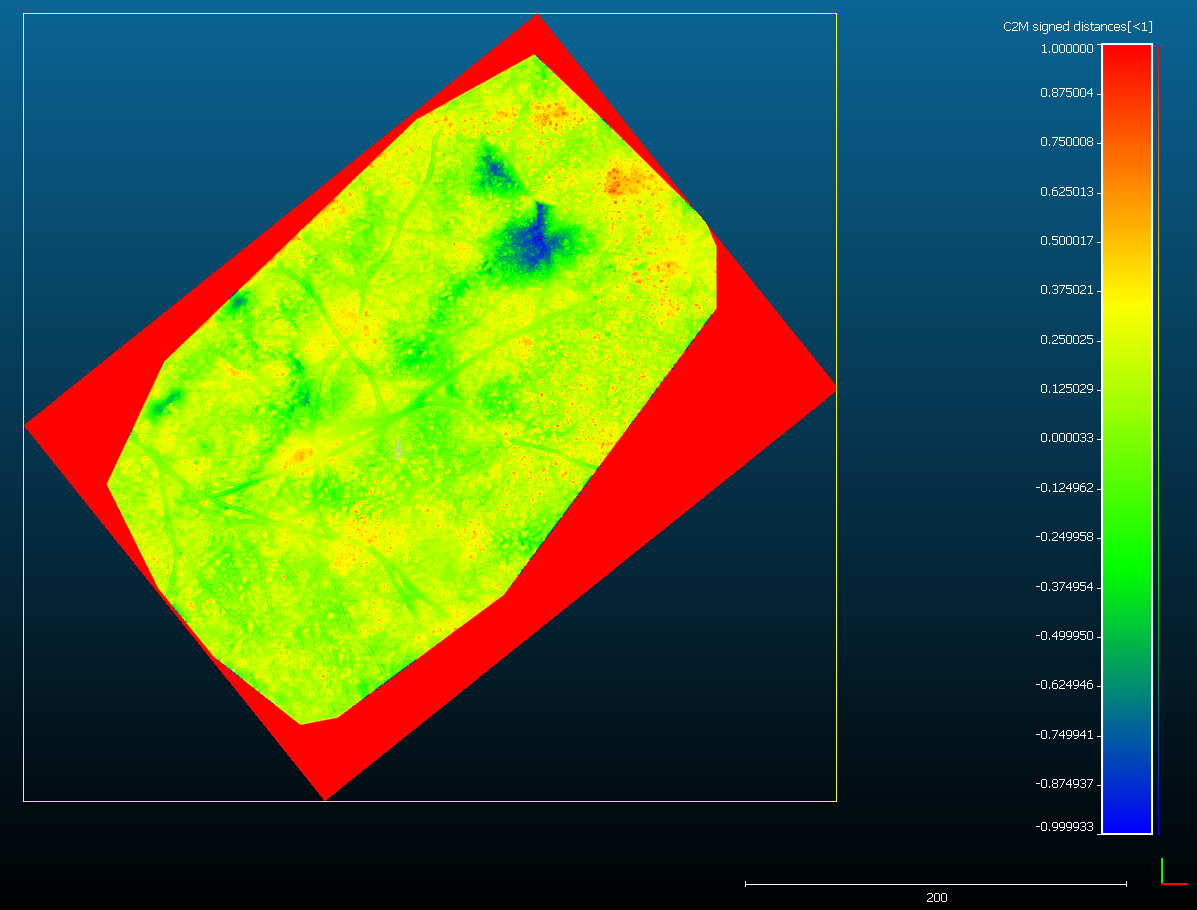
Średnio różnice wysokości pomiędzy danymi uzyskanymi skanerem laserowym a pomiarem bezpośrednim zrealizowane za pomocą tachimetru wynosiły 21 cm. Dla tego samego obszaru średnia różnica pomiędzy danymi z skanera mobilnego z pułapu BSP a danymi klasycznymi wynosiła 6 cm.
4. Prace na poligonach badawczych 6 S7 (POLIGON TESTOWY Rabka), 5 S7 (POLIGON TESTOWY Żuławy), 1 A1 (POLIGON TESTOWY Częstochowa).
Prace badawcze prowadzone na trzech poligonach w Rabce, Gdańsku oraz w Częstochowie były realizowane analogicznie do testów prowadzonych w Czernichowie z tą różnicą, że pomiar fotogrametryczny został wykonany tylko jedną jednostką pomiarową.
Ze względu na charakter pól testowych - w obszarze każdego z nich znajdowała się infrastruktura drogowa, co pozwoliło na wykonanie na tym obszarze klasycznych pomiarów skanerowych. Niezależnie uzyskano NMT z nalotów fotogrametrycznych.
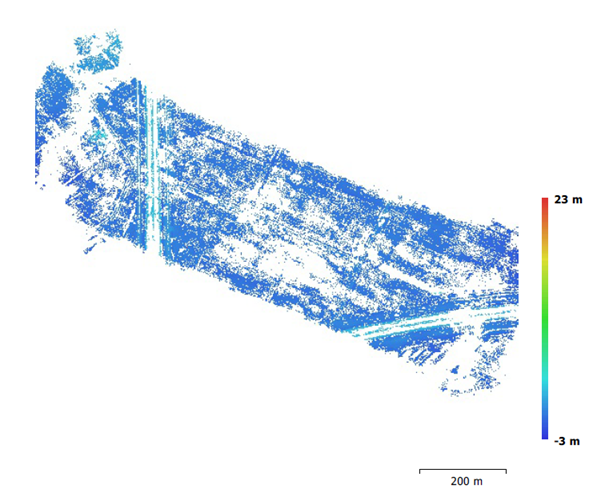

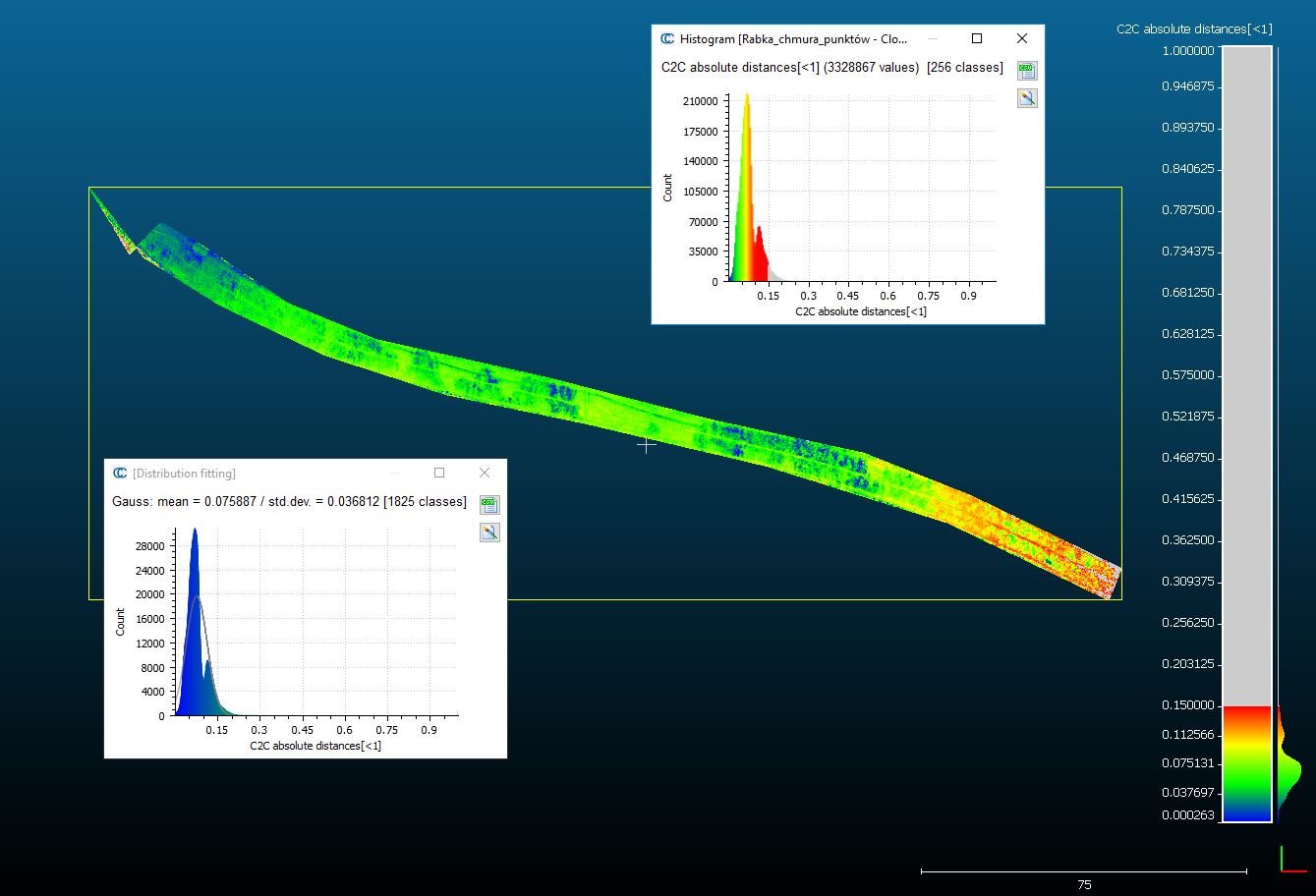
Jako reprezentatywny przykład tych prac można wskazać badania przeprowadzone w okolicach Rabki. Pomiar skanerem laserowym obejmował trzy fragmenty, które można charakteryzować jako obiekt drogowy (inwentaryzowany również fotogrametrycznie), odsłonięta polane oraz pomiar rzeźby terenu otaczającej wylot projektowanego tunelu drogowego.
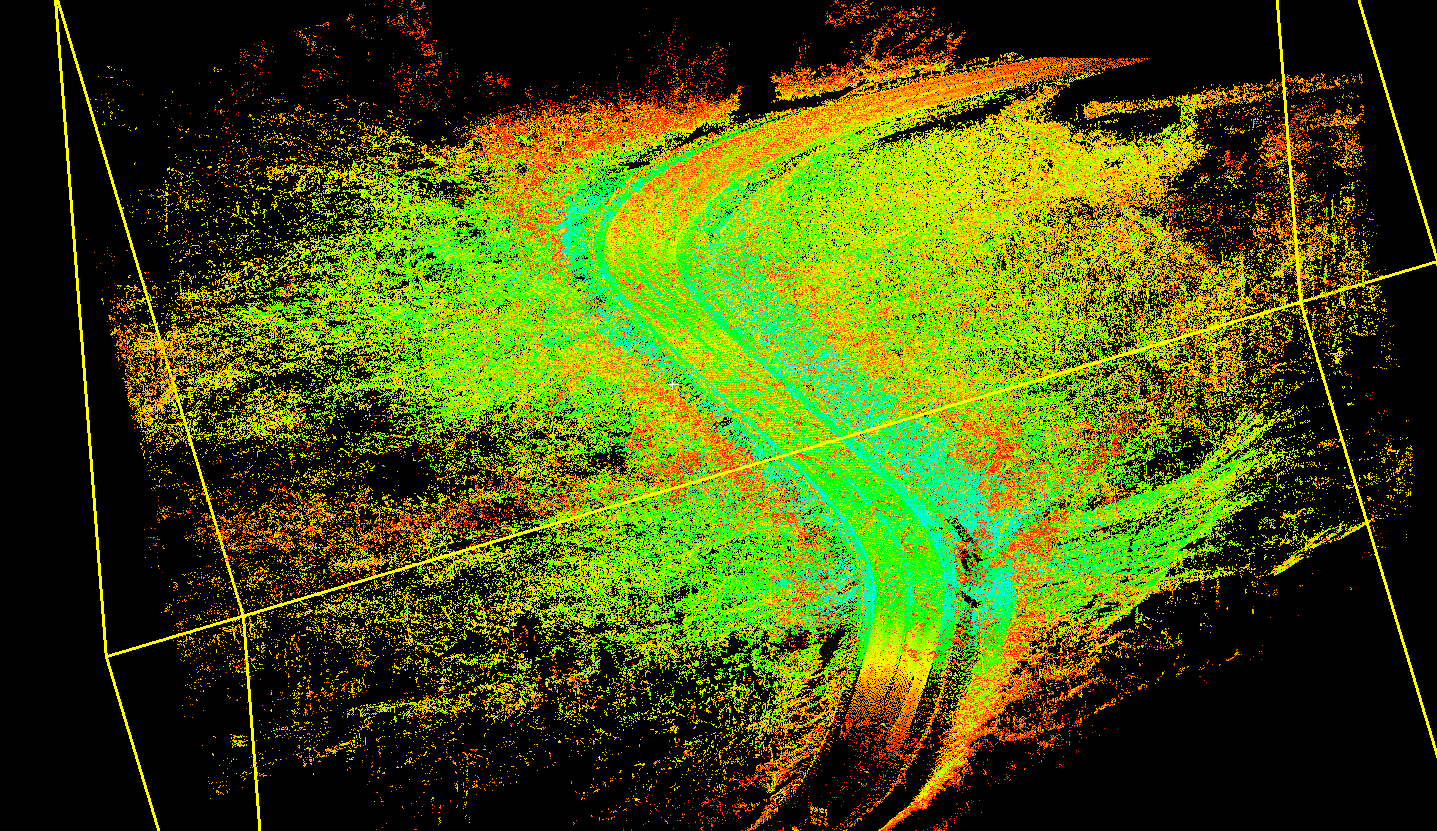
Chmura punktów reprezentująca pas drogowy po połączeniu i po filtracji może być przedmiotem opracowania danych geometrycznych (np. przekroje drogowe). W celach badawczych można ją porównać z analogicznym opracowaniem fotogrametrycznym.