Badania z wykorzystaniem naziemnego skanowania laserowego miały na celu:
- ocenę dokładności i powtarzalności utworzenia NMT poprzez odniesienie do pomiarów punktowych wykonanych klasycznymi technikami geodezyjnymi,
- ocenę dokładności i powtarzalności utworzenia NMT poprzez odniesienie do pomiarów fotogrametrycznych na zdjęciach wykonanych z pułapu BSP (UAV),
- optymalizację parametrów skanowania dla potrzeb inwestycji drogowych,
- ocenę efektywności zastosowania skanerów posiadających funkcję wielokrotnego odbicia (multi-target capability) do odwzorowania powierzchni terenu.
W tym zakresie badań zaangażowany był zespół AGH z Wydziału Geodezji Górniczej i Inżynierii Środowiska (Katedra Geodezji Inżynieryjnej i Budownictwa) w składzie: dr inż. Przemysław Kuras, dr hab. inż. Tomasz Owerko, dr inż. Rafał Kocierz, dr inż. Łukasz Ortyl.
Badania wykonano na obszarze 8 poligonów badawczych:
- 3-S19-1, 3-S19-2, 3-S19-3, 3-S19-4 – prace badawcze, wykonane na poligonach o zróżnicowanym ukształtowaniu terenu i pokryciu roślinnością, miały na celu utworzenie NMT i odniesienie ich do wyników geodezyjnych pomiarów klasycznych oraz fotogrametrycznych z pułapu UAV,
- 5-S7 – prace badawcze miały na celu utworzenie NMT i odniesienie ich do wyników pomiarów fotogrametrycznych z pułapu UAV,
- 10-M – prace badawcze miały na celu utworzenie NMT i odniesienie ich do wyników geodezyjnych pomiarów klasycznych,
- 6-S7, 13-Cz – prace badawcze miały na celu ocenę efektywności zastosowania skanerów posiadających funkcję wielokrotnego odbicia (multi-target capability) do odwzorowania powierzchni terenu.
W badaniach wykorzystano 3 różne skanery. Prace terenowe trwały łącznie 7 dni. Skanowaniem objęto obszar o łącznej powierzchni 27 ha. Skanery rozstawiono 234 razy.
Poniżej przedstawiono bardziej szczegółowy opis prac wykonanych na poszczególnych poligonach.
Poligony 3-S19-1, 3-S19-2, 3-S19-3, 3-S19-4, 5-S7, 10-M
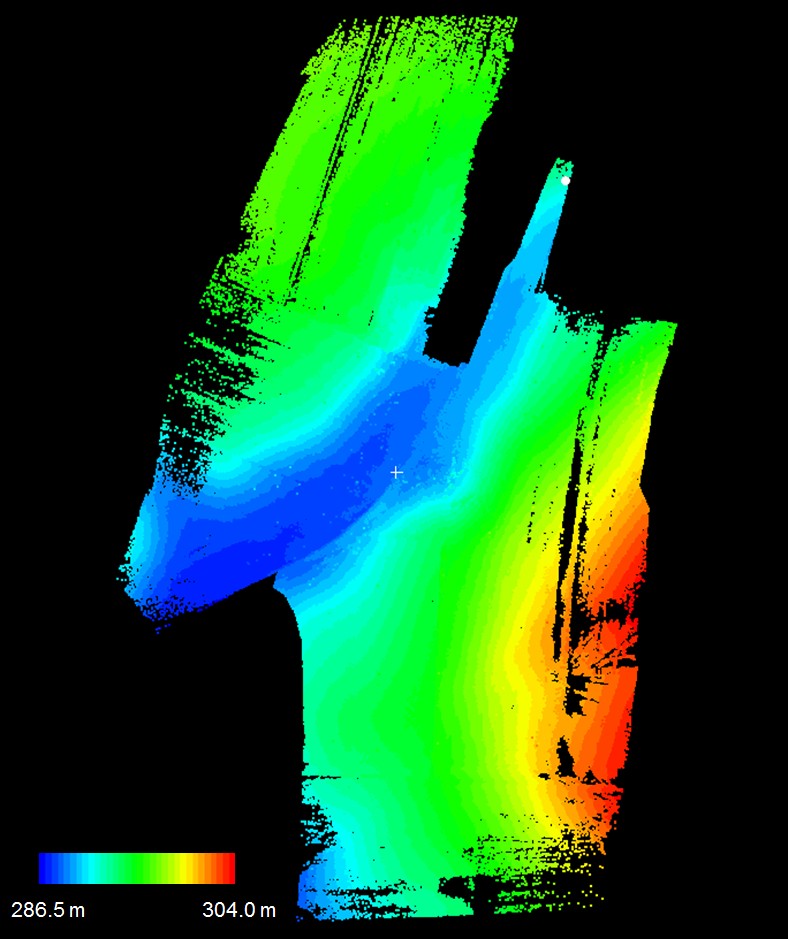
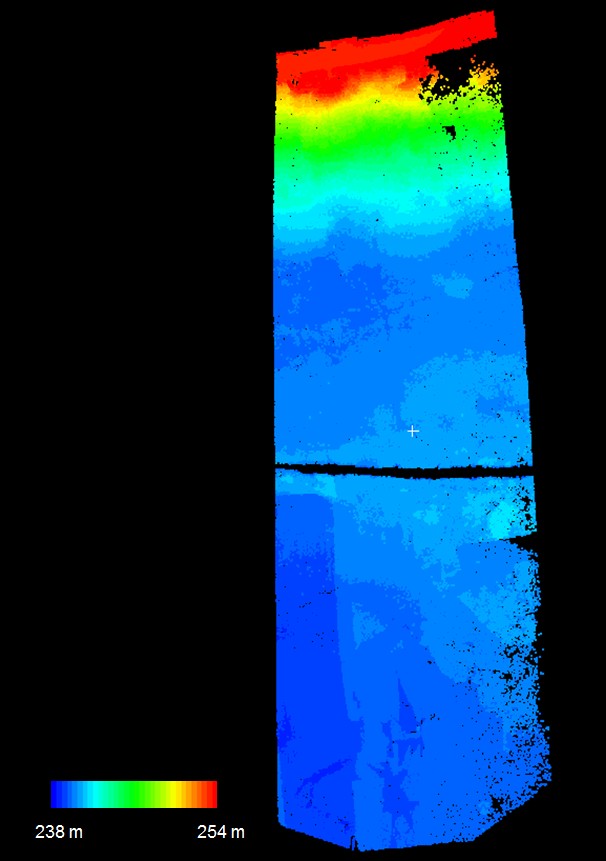
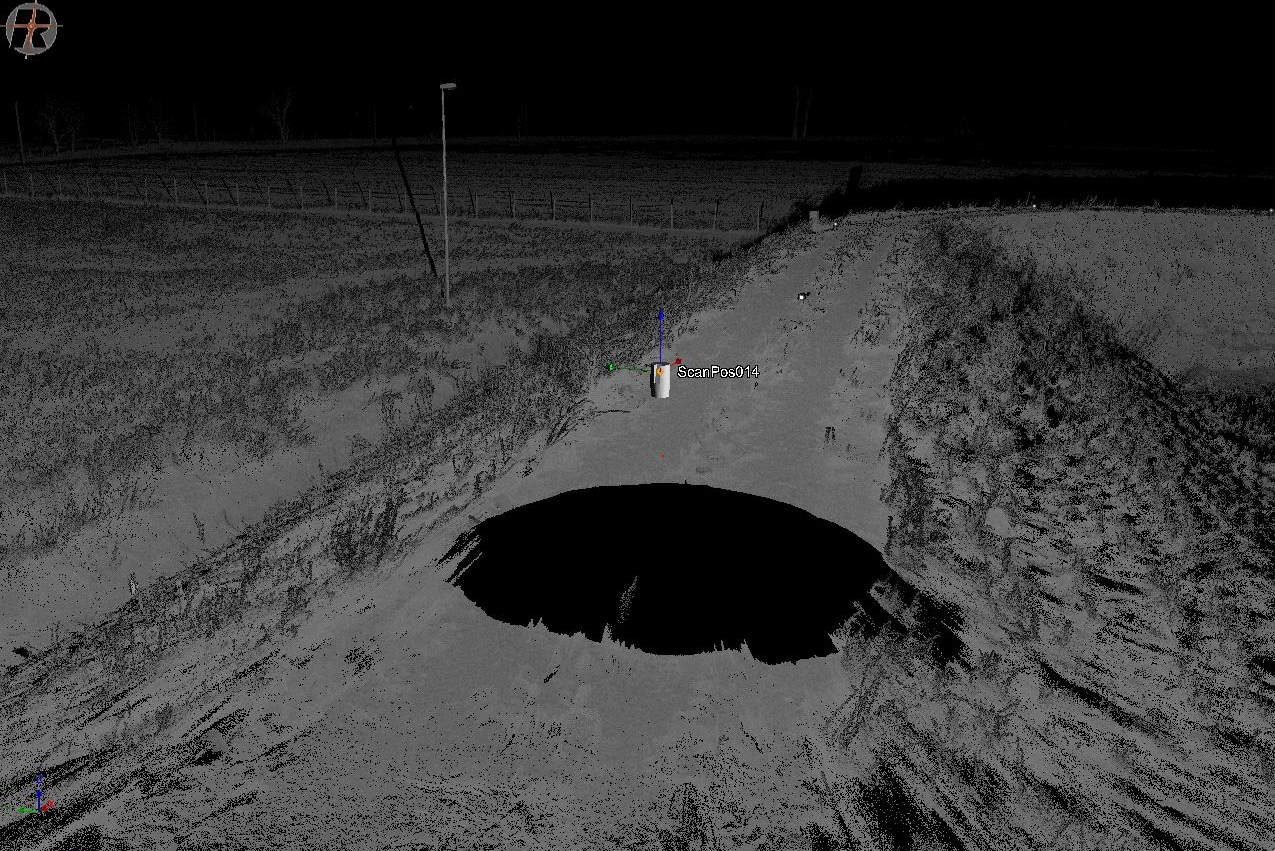
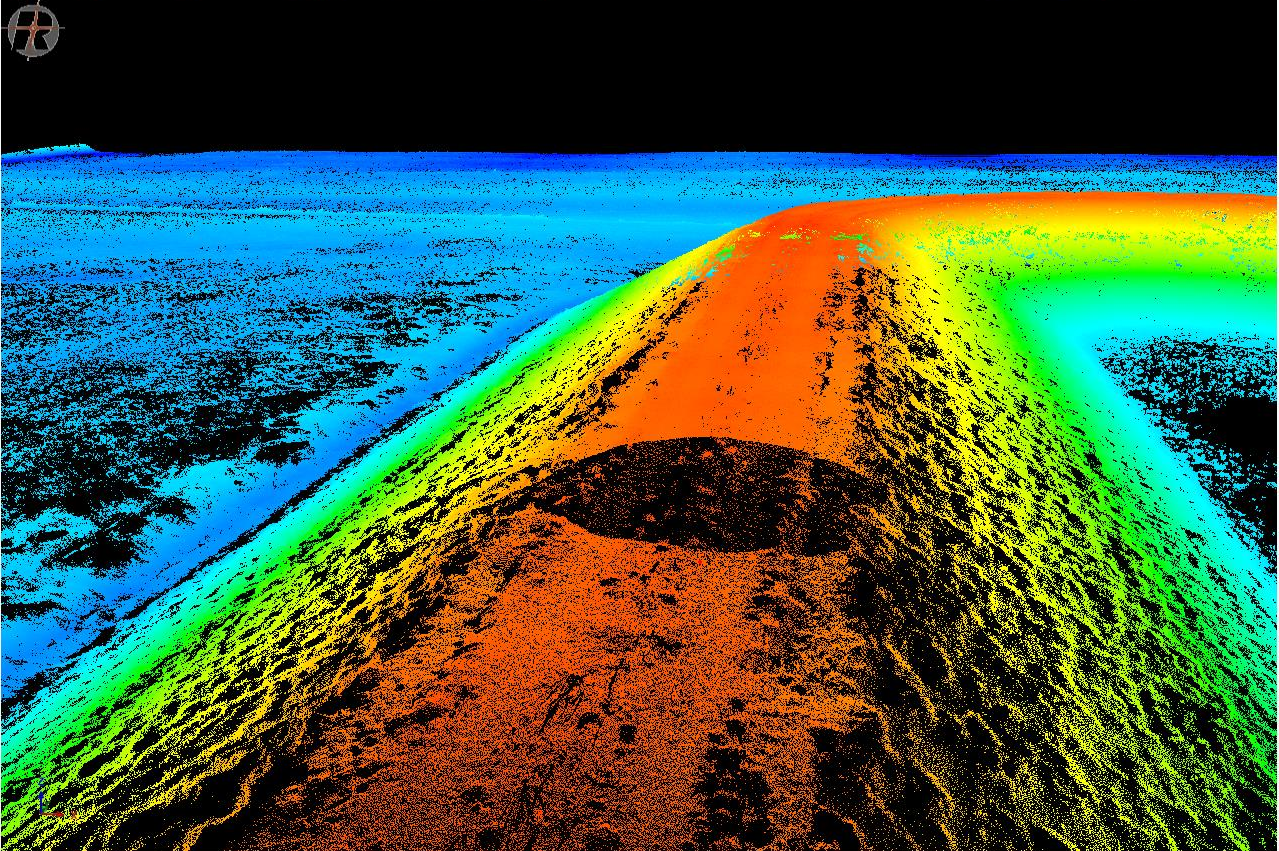
W okresie od marca do maja 2017 r. na 6 poligonach badawczych (4 w okolicach Janowa Lubelskiego, 1 na Żuławach Wiślanych, 1 w Krakowie) wykonano naziemne skanowanie laserowe przy użyciu instrumentów ZF Imager 5010C oraz Leica ScanStation C10. Wszystkie skany posiadały georeferencję nadaną poprzez pomiary RTN GNSS i tachimetryczne. Zróżnicowanie ukształtowania terenu oraz pokrycia roślinnością na poszczególnych poligonach jest widoczne na poniższych zdjęciach oraz chmurach punktach przedstawionych w kolorach wynikających z wysokości.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Zgodność wyników skanowania naziemnego z pomiarami klasycznymi oceniono poprzez porównanie zbioru (chmury) punktów z pomiaru klasycznego z powierzchnią mesh utworzoną na podstawie skanowania. Szczegółowe wyniki przekazano w formie sprawozdania do NCBiR, a część analiz będzie podstawą przygotowania publikacji.
Poligony 6-S7, 13-Cz
W miesiącach marcu i październiku 2017 r. na 2 poligonach badawczych (1 na wale przeciwpowodziowym w Czernichowie k. Krakowa, 1 w okolicach Rabki-Zdrój) wykonano naziemne skanowanie laserowe przy użyciu instrumentu Riegl VZ-400i. Wszystkie skany posiadały georeferencję nadaną poprzez pomiary RTN GNSS i tachimetryczne. Skuteczność filtracji chmur pozyskanych skanerem z funkcją wielokrotnego odbicia (multi-target capability) przedstawiono poglądowo dla obu poligonów na poniższych rysunkach.
 |
 |
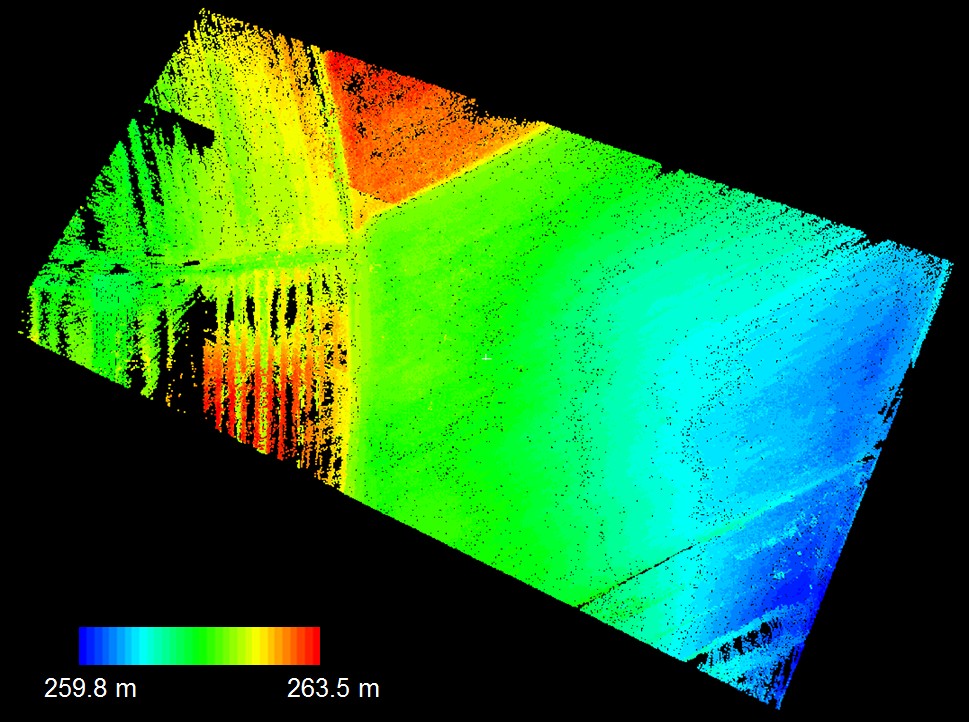
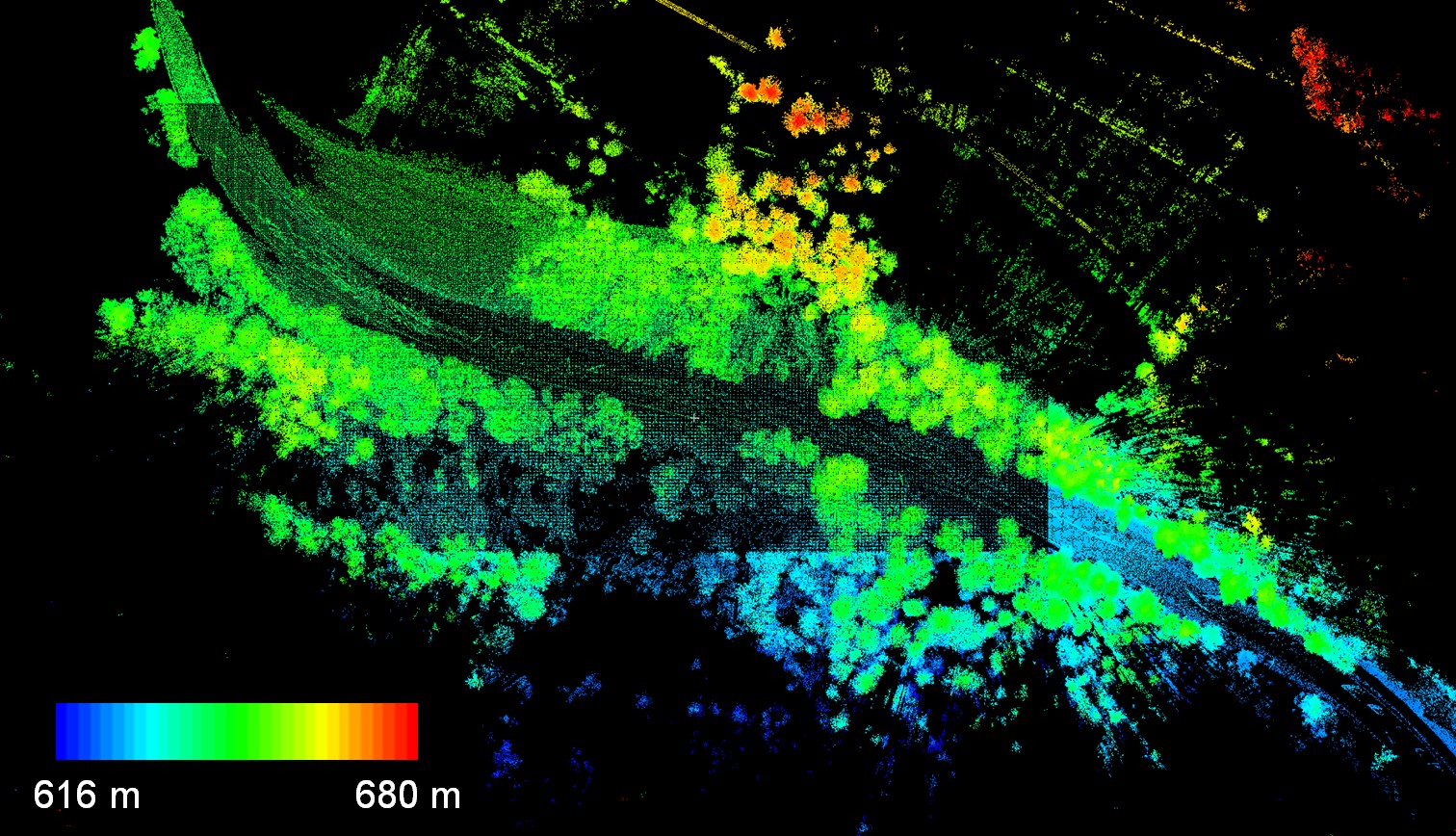
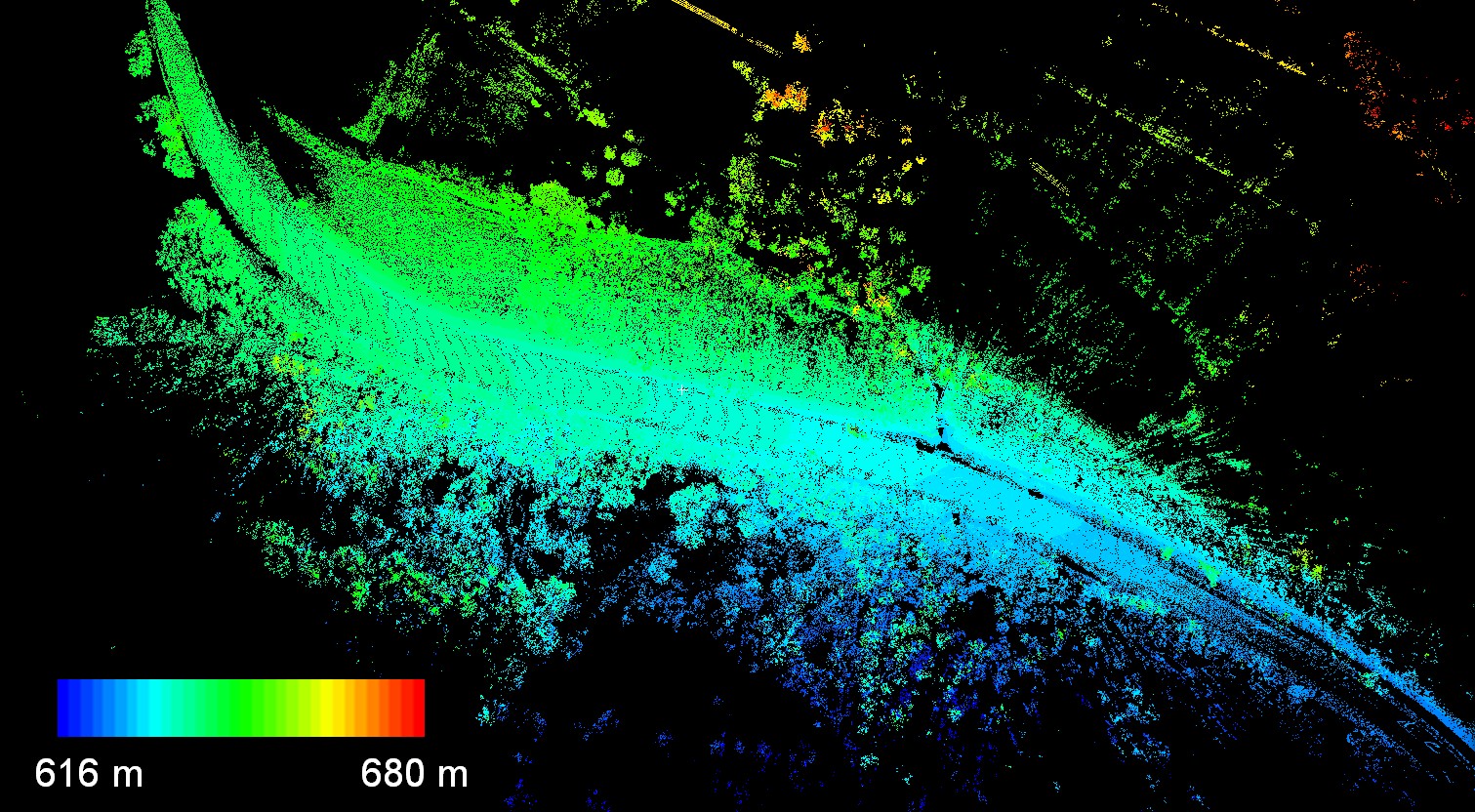
Chmura punktów przedstawiająca fragment wału przeciwpowodziowego (po lewej: z surowego pomiaru, po prawej: po zastosowaniu filtracji)
 |
 |
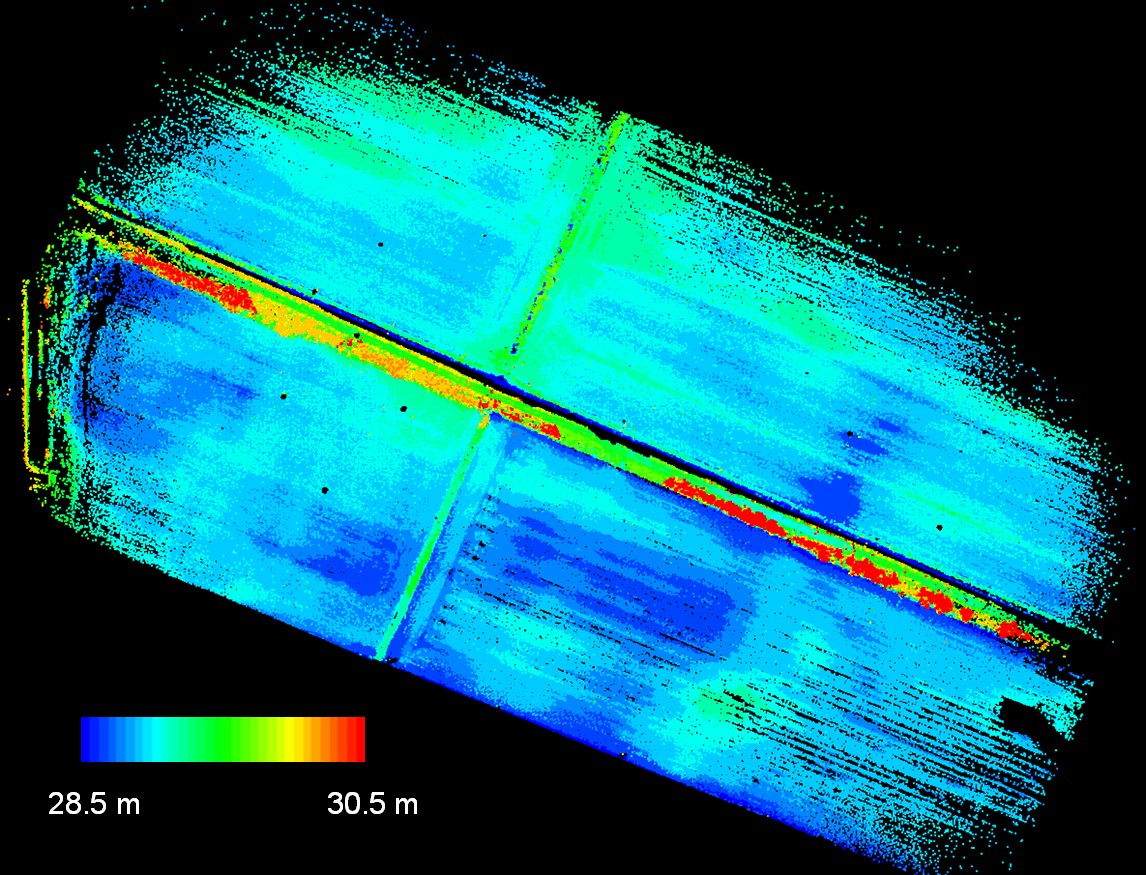
Chmura punktów przedstawiająca fragment pasa drogowego (po lewej: przed, po prawej: po zastosowaniu filtracji)
Efekty ilościowe zastosowania filtracji oceniono poprzez porównanie numerycznego modelu terenu z wynikami pomiarów pozyskanych innymi technikami pomiarowymi. Szczegółowe wyniki przekazano w formie sprawozdania do NCBiR, a część analiz będzie podstawą przygotowania publikacji.